 В продажу поступил новый высокотехнологичный программный продукт - Micro TRACE MODE 6 с адаптивным регулированием для контроллеров МФК, КРУИЗ, MicroPC, Fastwel, ROBO и плат в/в. В продажу поступил новый высокотехнологичный программный продукт - Micro TRACE MODE 6 с адаптивным регулированием для контроллеров МФК, КРУИЗ, MicroPC, Fastwel, ROBO и плат в/в.
Micro TRACE MODE устанавливается в контроллерах и программируется в удобной интегрированной среде разработки TRACE MODE 6 для Windows на любом из 5-и языков программирования  стандарта МЭК 61131/3. Программа содержит встроенные драйверы УСО контроллеров и имеет открытый формат для разработки пользовательских драйверов на языке ST или Си. стандарта МЭК 61131/3. Программа содержит встроенные драйверы УСО контроллеров и имеет открытый формат для разработки пользовательских драйверов на языке ST или Си.
Встроенные функции адаптивного регулирования (адаптивной самонастройки PI, PID и PDD-регуляторов), позволяют легко организовать регулирование параметров технологического процесса по улучшенным вариантам PI, PID, PDD и модального законов с возможностью автоматического (разового или периодического) вычисления их оптимальных настроек.
Библиотека алгоритмов адаптивного регулирования TRACE MODE 6, поддержанная в Micro TRACE MODE, содержит следующие модули:
- Адаптивное регулирование по ПИД-закону (модуль APID);
- Адаптивное регулирование по ПДД-закону (модуль APDD);
- Настройка PID-закона по скачку задания (модуль RJMP);
- Идентификация объекта (модуль IDNT);
- Настройка PID-закона по параметрам объекта (модуль CALC);
- Модальный регулятор (модуль MREG).
Модуль APID адаптивного регулирования используется для управления объектами, оснащенными пропорциональным исполнительным механизмом, а модуль APDD - для управления объектами, оснащенными интегрирующим исполнительным механизмом постоянной или переменной скорости отработки.  Оба модуля работают в два этапа: на первом этапе на вход объекта, наряду с сигналом с регулятора, подается пробный синусоидальный сигнал небольшой амплитуды. По амплитуде и фазе гармонической составляющей сигнала на выходе объекта контур адаптации путем изменения частоты пробных колебаний пытается отследить заданный фазовый сдвиг в объекте. Достигнув этого, контур рассчитывает оптимальные параметры настройки регулятора. На втором этапе генератор пробных колебаний и контур адаптивного регулирования отключаются, и начинает работать регулятор с оптимально настроенными параметрами. При необходимости процесс самонастройки можно запускать периодически, либо вообще не отключать. Оба модуля работают в два этапа: на первом этапе на вход объекта, наряду с сигналом с регулятора, подается пробный синусоидальный сигнал небольшой амплитуды. По амплитуде и фазе гармонической составляющей сигнала на выходе объекта контур адаптации путем изменения частоты пробных колебаний пытается отследить заданный фазовый сдвиг в объекте. Достигнув этого, контур рассчитывает оптимальные параметры настройки регулятора. На втором этапе генератор пробных колебаний и контур адаптивного регулирования отключаются, и начинает работать регулятор с оптимально настроенными параметрами. При необходимости процесс самонастройки можно запускать периодически, либо вообще не отключать.
Модуль RJMP (настройка ПИД-закона по скачку задания) обеспечивает подстройку параметров регулятора при каждой смене сигнала задания (если модуль включен в работу). Обычно достаточно трех-четырех небольших скачков по сигналу задания, чтобы параметры настройки регуляторы приблизились к оптимальным значениям. Модуль имеет высокое быстродействие, прост и нагляден в работе.
Модуль MREG автоматически рассчитывает оптимальные для данных параметров объекта коэффициенты модального регулятора с наблюдателем полного порядка и переходит в режим управления. Наличие в структуре регулятора цифровой модели объекта и наблюдателя позволяет сформировать упрежденный по времени на величину запаздывания выход объекта. Такой подход обеспечивает высокое качество управления для объектов с любым, даже очень большим запаздыванием. Модальный регулятор может обеспечить в два - три раза большее быстродействие, чем оптимально настроенный ПИД регулятор, при значительно меньшей чувствительности к шумам в канале измерения.
Модуль CALC, получая от модуля IDNT нормированные параметры передаточной функции объекта, автоматически рассчитывает оптимальные значения коэффициентов цифровых ПИ или ПИД регуляторов в форме, используемой в TRACE MODE (звено PID), выдавая коэффициенты KP, KI, KD для периода опроса канала, в котором работал модуль IDNT. Это расширяет возможности использования обычного ПИД регулятора.
Программы адаптивного регулирования для Micro TRACE MODE можно отлаживать online в редакторах TRACE MODE.
Контроллер, запрограммированный в Micro TRACE MODE, легко подключается к операторскому ПК на базе SCADA TRACE MODE 6 через встроенные протоколы I-NET И M-LINK (интеграция на уровне проекта). Также его можно подключить к другим SCADA через OPC-сервер. |
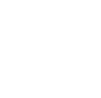







 Компания АдАстра предлагает вниманию пользователей как бесплатной базовой, так и профессиональной версии SCADA-системы TRACE MODE 6 демонстрационную версию интерактивного симулятора энергоблока ТЭЦ. Проект демонстрирует возможности применения SCADA TRACE MODE 6 для разработки АСУ ТП энергоблоков и может быть использован как тренажер.
Компания АдАстра предлагает вниманию пользователей как бесплатной базовой, так и профессиональной версии SCADA-системы TRACE MODE 6 демонстрационную версию интерактивного симулятора энергоблока ТЭЦ. Проект демонстрирует возможности применения SCADA TRACE MODE 6 для разработки АСУ ТП энергоблоков и может быть использован как тренажер.
 Компания АдАстра разработала семейство новых бесплатных драйверов SCADA- системы TRACE MODE 6 для связи с новым поколением контроллеров компании Mitsubishi Electric:
Компания АдАстра разработала семейство новых бесплатных драйверов SCADA- системы TRACE MODE 6 для связи с новым поколением контроллеров компании Mitsubishi Electric: В SCADA TRACE MODE 6 включены новые бесплатные драйверы для тепловычислителей СПТ961, СПТ961М, корректоров расхода природного и технических газов СПГ761, СПГ762, СПГ763, а также драйвер счетчиков-сумматоров электрической энергии и мощности СПЕ542 производства НПФ Логика.
В SCADA TRACE MODE 6 включены новые бесплатные драйверы для тепловычислителей СПТ961, СПТ961М, корректоров расхода природного и технических газов СПГ761, СПГ762, СПГ763, а также драйвер счетчиков-сумматоров электрической энергии и мощности СПЕ542 производства НПФ Логика. Новый бесплатный драйвер SCADA TRACE MODE для электросчетчиков ЦЭ6827М, ЦЭ6827М1 и ЦЭ6822 производства Концерна ЭНЕРГОМЕРА доступен для бесплатного скачивания в разделе технической поддержки сайта.
Новый бесплатный драйвер SCADA TRACE MODE для электросчетчиков ЦЭ6827М, ЦЭ6827М1 и ЦЭ6822 производства Концерна ЭНЕРГОМЕРА доступен для бесплатного скачивания в разделе технической поддержки сайта.  AdAstrA Research Group, Ltd выпустила первый внешний драйвер для системы программирования промышленных контроллеров Micro TRACE MODE 6. Новый драйвер позволяет подключать к контроллеру WinCon 8000 датчики и расходомеры, использующие популярный протокол HART.
AdAstrA Research Group, Ltd выпустила первый внешний драйвер для системы программирования промышленных контроллеров Micro TRACE MODE 6. Новый драйвер позволяет подключать к контроллеру WinCon 8000 датчики и расходомеры, использующие популярный протокол HART.  В SCADA систему TRACE MODE 6 добавлена поддержка анализаторов электроэнергии Algodue серий UPT и UPM.
В SCADA систему TRACE MODE 6 добавлена поддержка анализаторов электроэнергии Algodue серий UPT и UPM. 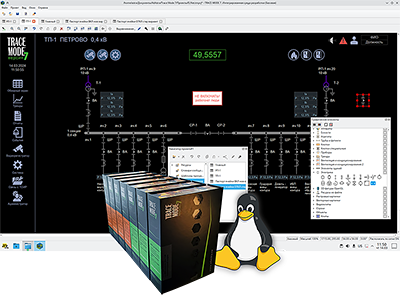 19 марта 2024 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1.0.2 профессиональной и базовой линий для операционных систем Linux и Windows.
19 марта 2024 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1.0.2 профессиональной и базовой линий для операционных систем Linux и Windows. 2 февраля 2024 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1.0.1 профессиональной и базовой линий для операционных систем Linux и Windows.
2 февраля 2024 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1.0.1 профессиональной и базовой линий для операционных систем Linux и Windows.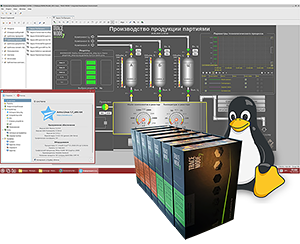 10 ноября 2023 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1 профессиональной и базовой линий для операционных систем Linux и Windows.
10 ноября 2023 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1 профессиональной и базовой линий для операционных систем Linux и Windows.  12 декабря 2023 г. компания АдАстра сообщила об устранении уязвимостей в МРВ и NLL TRACE MODE 6.10.2, обнаруженных компанией Positive Technologies в рамках технологического сотрудничества в области кибербезопасности.
12 декабря 2023 г. компания АдАстра сообщила об устранении уязвимостей в МРВ и NLL TRACE MODE 6.10.2, обнаруженных компанией Positive Technologies в рамках технологического сотрудничества в области кибербезопасности. 
 22 июня 2023 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.0.0.2 профессиональной и базовой линий.
22 июня 2023 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.0.0.2 профессиональной и базовой линий. 
 08.12.2023 Компания АдАстра (Москва) подвела итоги работы бета-тестеров SCADA TRACE MODE 7.1 для Linux.
08.12.2023 Компания АдАстра (Москва) подвела итоги работы бета-тестеров SCADA TRACE MODE 7.1 для Linux. 
 09 мая 2023 г. компания Адастра опубликовала новую версию корпоративного сайта.
09 мая 2023 г. компания Адастра опубликовала новую версию корпоративного сайта.  Компания АдАстра (Москва) выпустила новую книгу "TRACE MODE 7: ПРАКТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ / РУКОВОДСТВО АДМИНИСТРАТОРА".
Компания АдАстра (Москва) выпустила новую книгу "TRACE MODE 7: ПРАКТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ / РУКОВОДСТВО АДМИНИСТРАТОРА".  в помощь тем, кто эксплуатирует промышленные АСУ, разработанные в инструментальной системе TRACE MODE 7.
в помощь тем, кто эксплуатирует промышленные АСУ, разработанные в инструментальной системе TRACE MODE 7.
 Новый программный продукт доступен пользователям TRACE MODE 6 профессиональной линии для бесплатного скачивания и ...
Новый программный продукт доступен пользователям TRACE MODE 6 профессиональной линии для бесплатного скачивания и ...


















